ROS
Robotetarako softwarea garatzeko framework-multzo bat.
Sistema eragile baten zerbitzu estandarrak eskaintzen ditu, hala nola hardwarearen abstrakzioa, behe-mailako gailuen kontrola, erabilera orokorreko funtzionalitatea ezartzea, prozesuen arteko mezuak pasatzea eta paketeak mantentzea.
Informazio osagarria:
- 1 Hiztegigintza
-

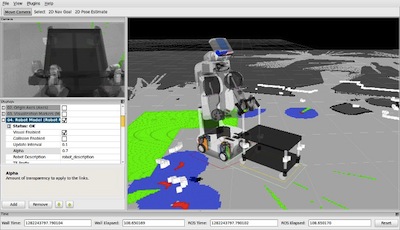
ROS bidezko simulazioa
Elhuyar hiztegia |
ZTH hiztegia |
Euskalterm |
Wikipedia |